A self-aware swarm of underwater vehicles
|
Permalink
Thomas Schmickl, Christoph Möslinger, and Ronald Thenius
28 November 2011
Europe's Collective Cognitive Robots project aims to create a group of interacting, autonomous robots that could perform ecological monitoring and other tasks in underwater habitats.
The vast oceans that cover most of Earth's surface are still mainly unexplored. Their gigantic volume is impossible to monitor area-wide. When something is lost, such as a crashed airplane's black box or sunken cargo, or when toxic waste is illegally dumped into the ocean, either manned submarines or unmanned remotely operated vehicles (ROVs) are used for recovery. In some cases, it is also possible to use single autonomous underwater vehicles (AUVs), such as for periodic environmental surveys. However, to cover wider areas of the ocean, these single-instance measures/explorations are insufficient. Thus, autonomous wide-area seabed exploration is a future goal in this field.
In the past few years, illegal dumping of toxic waste was reported in the Mediterranean Sea, threatening the European Union's ocean ecology, fishery economy and tourism industry.1 As soon as one of these waste containers starts leaking and the first traces of toxic substances can be detected in the water, the challenge is finding the source spots as soon as possible. Unfortunately, these substances do not form gradients of pollution in the water that can simply be followed to the source by a singular gradient-ascent-driven AUV. As one solution to this problem, the Collective Cognitive Robots (CoCoRo) project aims to generate the enabling technologies for a whole swarm of AUVs that will act as an autonomous, self-aware distributed sensor network.2 It will be able to efficiently search for a target over a large area.
In addition to specific search missions, frequent and autonomous environmental monitoring is becoming increasingly important because ocean ecology has a significant impact on human industries such as fishing and tourism. Pollution or changes in water temperature can have a cascade effect on ocean life, leading to explosive growth of non-native species or decreases of valuable fish stock. For example, in the last decade, a mass bloom of jellyfish caused severe damage to fisheries.3 These blooms are assumed to be caused by ocean pollution, which affects the polyp fields on the seabed. Also, the European Union fishery can be significantly affected by these threats, which are expected to intensify in the future. The CoCoRo project will investigate basic enabling technologies for these purposes.
With CoCoRo, we are developing a swarm of small AUVs approximately 20–30cm long (see Figure 1) that aid in group survival in harsh oceanic habitats and help it achieve its objectives faster and/or more reliably. A swarm will consist of singular AUVs that are aware of their environment by exploiting multiple redundant arrays of sensors for pressure, light, sound and other factors. However, swarm members also will act in a ‘swarm-intelligent’ way by simple interaction rules and by exchange of simple and redundant signals.4, 5 Exploiting these rules of interaction, the swarm can self-organize, generating swarm-level awareness or cognition. Social organisms have shown that simple interaction rules can generate group-level cognition, facilitating group-level decision making and collective awareness, including swarm-level memory.6 In CoCoRo, we aim to generate similar systems by implementing bio-derived mechanisms like artificial immune systems, honeybee-derived algorithms, or cockroach-derived behaviours.
Figure 1.
Conceptual shapes for the Collective Cognitive Robots (CoCoRo) project's autonomous underwater vehicles (AUVs) with different abilities for the resulting swarm. Each small AUV will be equipped with multiple sensors so it is aware of its environment and other swarm members. (Images courtesy of Cesare Stefanini, Scuola Superiore Sant'Anna.)

In ethology and physiology, a plethora of experimental setups exist to investigate and benchmark the cognitive capabilities of organisms. As CoCoRo aims for swarm-level cognition arising from self-organization, we will develop a similar set of benchmarks. We will start with simple experiments that analyse how aware the CoCoRo swarm is of its own size and environmental conditions. Later, we will investigate its capabilities in collective decision making and homeostatic balancing. Additionally, we will investigate how a swarm can be generated that can know that it actually does not know something. Finally, we plan to perform a mirror test to investigate whether it is possible for a swarm as a whole to discriminate between its own mirror image and another swarm.7
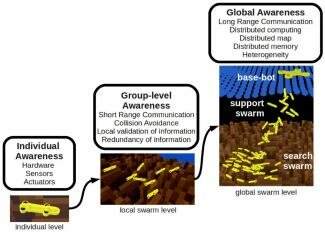
It is important to note that the scientific focus of the CoCoRo project is not hardware development. Instead, we are concentrating research on new algorithms, supported by appropriate sensor/actuator design, which allows generation of cognition and self-awareness in a decentralized, self-organizing way (see Figure 2). Such mechanisms could significantly enhance the capabilities of autonomous technical devices, not only underwater, but also in everyday life, such as ad hoc networks formed by smart-phones, cars or network-enabled household devices.
Figure 2.
Different levels of awareness in the CoCoRo system. Individual AUVs are aware of their environment through their own sensors, while groups of AUVs are aware of their swarm through short-range communications. Global awareness will be achieved by distributed swarm algorithms that lead to heterogeneous swarms. The base bot will serve as a connection to the water surface to allow long-range communications with researchers and other CoCoRo systems.
Authors
Thomas Schmickl
University of Graz
Christoph Möslinger
University of Graz
Ronald Thenius
University of Graz
References
-
http://en.wikinews.org/wiki/Italian_mafia_accused_of_radioactive_waste_ dumping. Article on jellyfish bloom. Accessed 3 November 2011.
-
C. T. Schmickl R. Thenius, CoCoRo---the self-aware underwater swarm, Fifth IEEE Int'l Conf. Self-Adapt. Self-Org. Syst., 2011.
-
C. Lynam, P. Christopher, M. Gibbons, E. Bj⊘rn and B. Axelsen, Jellyfish overtake fish in a heavily fished ecosystem, Curr. Biol. 16 (13), pp. 492, 2006.
-
E. Bonabeau, M. Dorigo and G. Therualaz, Swarm Intelligence: From Natural to Artificial Systems, Oxford University Press, Santa Fe Institute Studies in the Sciences of Complexity, New York, 1999.
-
J. Kennedy and R. C. Eberhart, Swarm Intelligence, pp. 1-512, Morgan Kaufmann, San Francisco, 2001.
-
S. Camazine, J. L. Deneubourg, N. Franks, J. Sneyd, G. Theraulaz and E. Bonabeau, Self-Organization in Biological Systems, Princeton University Press, 2001.
-
G. G. Gallup Jr., Chimpanzeees: self-recognition, Science 167, pp. 8687, 1970. doi:10.1126/science.167.3914.86
DOI: 10.2417/3201111.003880